Category: Innovation
In the oil & gas and renewables sectors, applied acoustics sparkers are a go-to option for ultra-high resolution geophysical surveys. This year especially, we’ve seen a high demand for our Dura-Spark 400+400 and accompanying CSP units.
We’ve also had many enquiries from customers, already in possession of aae equipment, who are looking to upgrade to the stacked sparker. However, these customers are often unsure what the benefits of the stacked sparker system are and if their existing equipment is compatible.
A common line of enquiry is:
- What are the advantages of the Dura-Spark 400+400 over single-deck sparkers?
- How do I power the unit?
- which CSP works best with the stacked sparker?
- can I use my existing CSP unit?
Here, we endeavour to explain and clarify these points for customers considering the Dura-Spark 400+400.
What are the advantages of a stacked sparker?
The key advantage of the two-deck, stacked sparker system is the ability to fire the unit in different modes: Flip-Flop, Fire-Delay and Split-Fire. These modes describe the number of tips per shot, in use, and the deck fire sequence used to produce the source pulse. By engaging different fire modes, the source fire rate can be increased or the pulse frequency content fine-tuned.
Flip-Flop mode
In this mode, we fire one deck at a time, alternating between the top and bottom deck with each trigger signal. This requires two separate CSPs, one to power the top unit and a second to power the bottom. The key advantage is the ability to fire the source at twice the max shot interval, possible with a single CSP unit. In this way, we can greatly increase the shot density of a survey and in turn, the horizontal resolution.
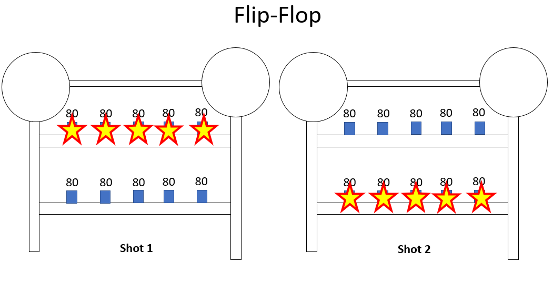
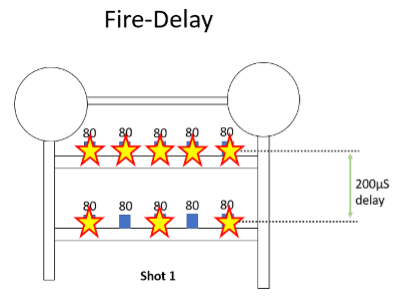
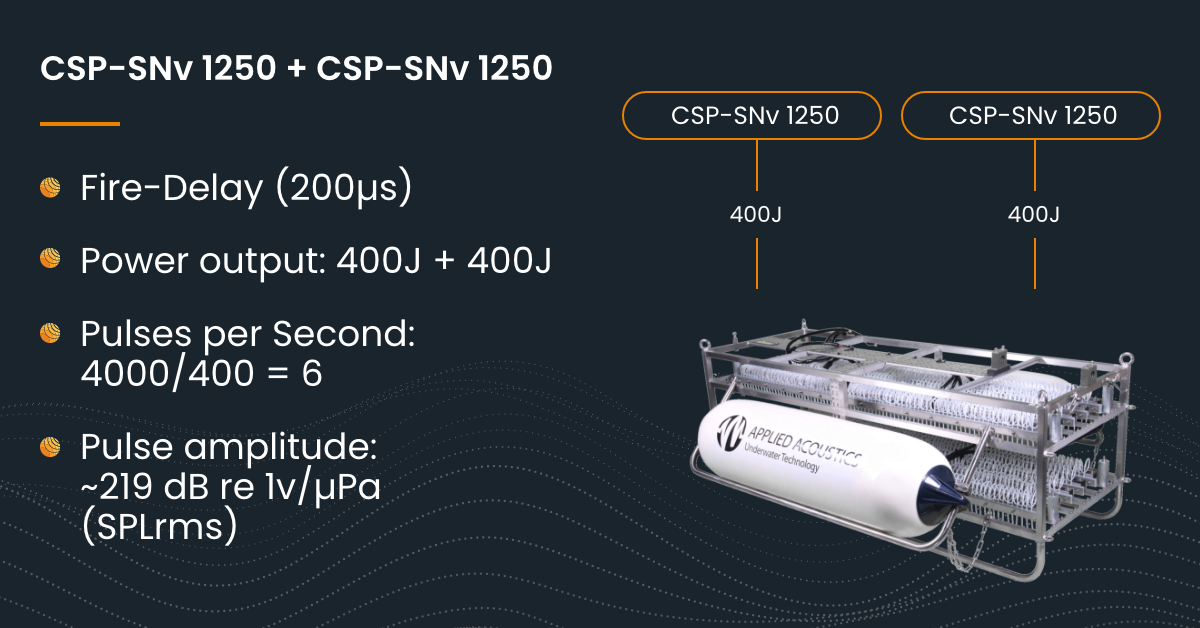
Fire-Delay
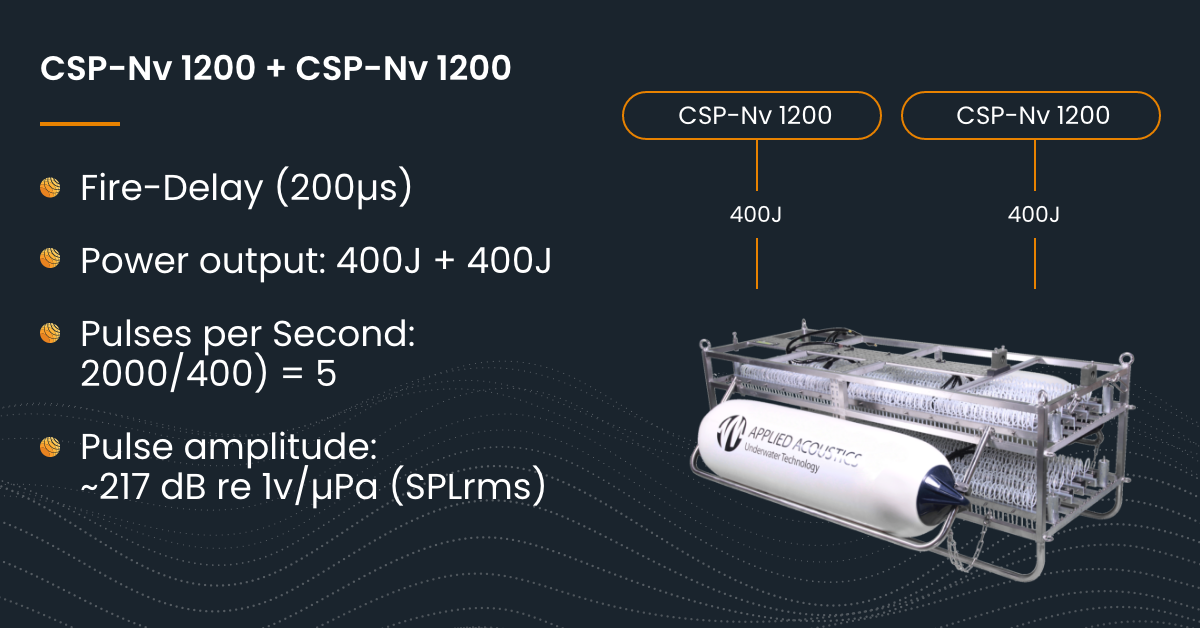
As with Flip-Flop mode, fire delay requires two CSP units; one for each deck of the sparker. However, in this mode instead of firing the top and bottom deck at separate intervals; they are fired in very close succession (~200μS delay).
Firing in this way has two advantageous effects. Firstly, by timing the firing of the second deck correctly, we are able to suppress the negative effects of the secondary pulse oscillations (‘bubble pulse’). This gives us a shorter duration, higher amplitude pulse; than can be produced by a single deck sparker.
By further tweaking the power levels, the number of tips, time delay and sparker depth; Fire-Delay also gives the user the ability to fine-tune the frequency content of their source pulse.
Split-Fire
This mode in practice is very similar to Fire-Delay. However, instead of upper and lower decks firing in close succession; arrays on the same deck are fired with a very small time delay. Again, the purpose of this mode is to give the user the ability to fine-tune the frequency content of the source pulse; for example, lengthening the pulse and in turn, adding energy to lower frequency components. Split-Fire mode can be employed with any multi-array sparker. However, as with Fire-Delay, two CSP units are required.

Choosing a CSP (bangbox):
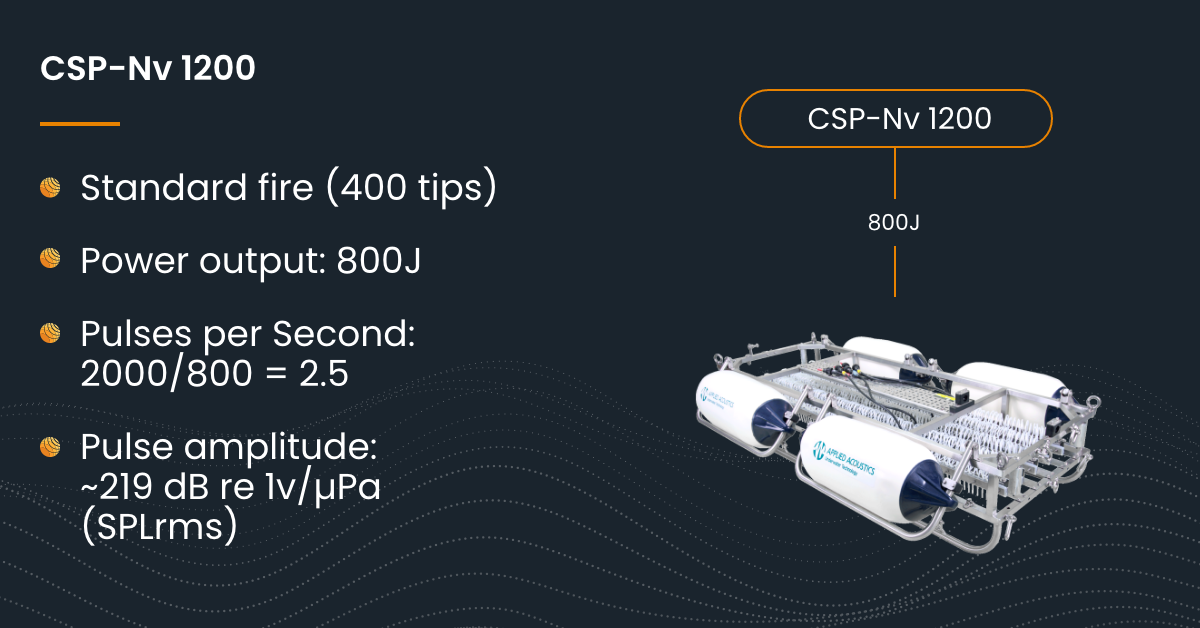
Customers looking to purchase our Dura-Spark 400+400 sparker, obviously want to make full use of the sparkers power levels and fire modes. We therefore recommend using the Dura-Spark 400+400 in conjunction with either the CSP-Nv 1200, CSP-Nv 2400 or CSP-SNv 1250. All of these CSPs have the Flip-Flop and Fire-Delay functions which enable them to be used in partnership with a second CSP, as either a ‘control’ or ‘slave’ unit.
[Note: older CSP units, i.e. CSP-N, can be used as ‘slave’ units in conjunction with a newer model, but only CSP-Nv 1200, CSP-Nv 2400 or CSP-SNv 1250 can be used as the control unit.]
The number in the CSP name relates to the max output energy possible for a single discharge: 1200, 2400 or 1250 Joules respectively. The Nv or SNv variations have differing charging rates of: 2000J/s or 4000J/s respectively.
When assessing the suitability of a CSP unit for your particular survey needs, it is critical to ensure that your unit’s charging rate, is greater than the shot power × shot frequency required for your survey operations.
Charging Rate (J/s) ≥[Output energy (J) ×shot frequency (Hz)]
The above equation is valid for single deck sparkers with one CSP operating in standard mode or Dura-Spark 400+400 sparkers, in standard or Fire-Delay mode. Be aware, that when using Flip-Flop mode; the charging rate of a single CSP is effectively doubled. (See below for some examples of this in practice).

For more information on the Dura-Spark 400+400 and its features, please feel free to contact the aae team.