Category: USBL
The latest incarnation of USBL from applied acoustics (aae technologies) makes its debut at Oceanology 2024, the biennial ocean technology showcase taking place at Excel, London’s leading exhibition and conference centre. Replacing the long serving but retiring Alpha systems and building upon aae’s expertise across the complete spectrum of subsea acoustic positioning, the new Vesta USBL has all the traits to become the workhorse of the entry level USBL market.
As with all USBLs, tracking performance determines the success or failure of these systems in terms of acceptance as a vital piece of the offshore armoury, and despite Vesta’s small format, it certainly packs a punch in this area. Featuring a smaller, lighter and more robust transceiver than its predecessor, the system can reach tracking ranges of up to 1km thanks to the introduction of aae’s new Sigma 3 digital spread spectrum acoustic protocols.
Surpassing the performance of the Alpha system, Sigma 3 also gives the ability for the Vesta system to track up to 8 targets simultaneously, to input an external heading reference, and to utilise the digital depth telemetry incorporated into aae’s range of depth beacon, which now includes depth capability built into the 1300 series micro beacon range.
Vesta USBL comprises an individual desktop console to which is connected the user’s operating PC and a 904C transceiver, an updated addition to the transceiver range featuring an integral AHRS, depth sensor and temperature sensor. With everything packaged in a single transit case the compact Vesta system is ideal for shipping between vessels of opportunity and small craft use.
The addition of Vesta USBL to the range of systems aae has to offer completes the portfolio of digital subsea tracking systems and widens the choice available to users, from entry level to extremely advanced with a number of options in between.
As a professional working on subsea operations, you’ll know the importance of accurately tracking underwater targets – moving or static. An Ultra-Short Baseline (USBL) system accomplishes this using acoustic positioning – but which type will be right for your job?
Understanding how USBLs work will help you find the right product for your needs. Here, we’ll look at their features and how they vary for use in different depths.
What does a USBL do?
A USBL system is a way to track the location of subsea objects in a wide range of water depths – anything from 5 to 5,000 metres or more. You might need to work anywhere from a harbour or coastline environment to a deep-sea location according to your industry and field of study or expertise.
Use cases for USBLs typically involve tracking the position of remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), human divers, underwater structures and various kinds of equipment – fixed or unfixed. Sometimes, USBLs are also used to map the sea bed or as a method of position referencing for surface vehicles.
USBLs are popularly used by companies working in offshore wind, geologists, surveyors, the military and conventional energy companies – wherever they need to track or position assets, explore the sea bed and carry out inspections, maintenance and repairs.
How a USBL works
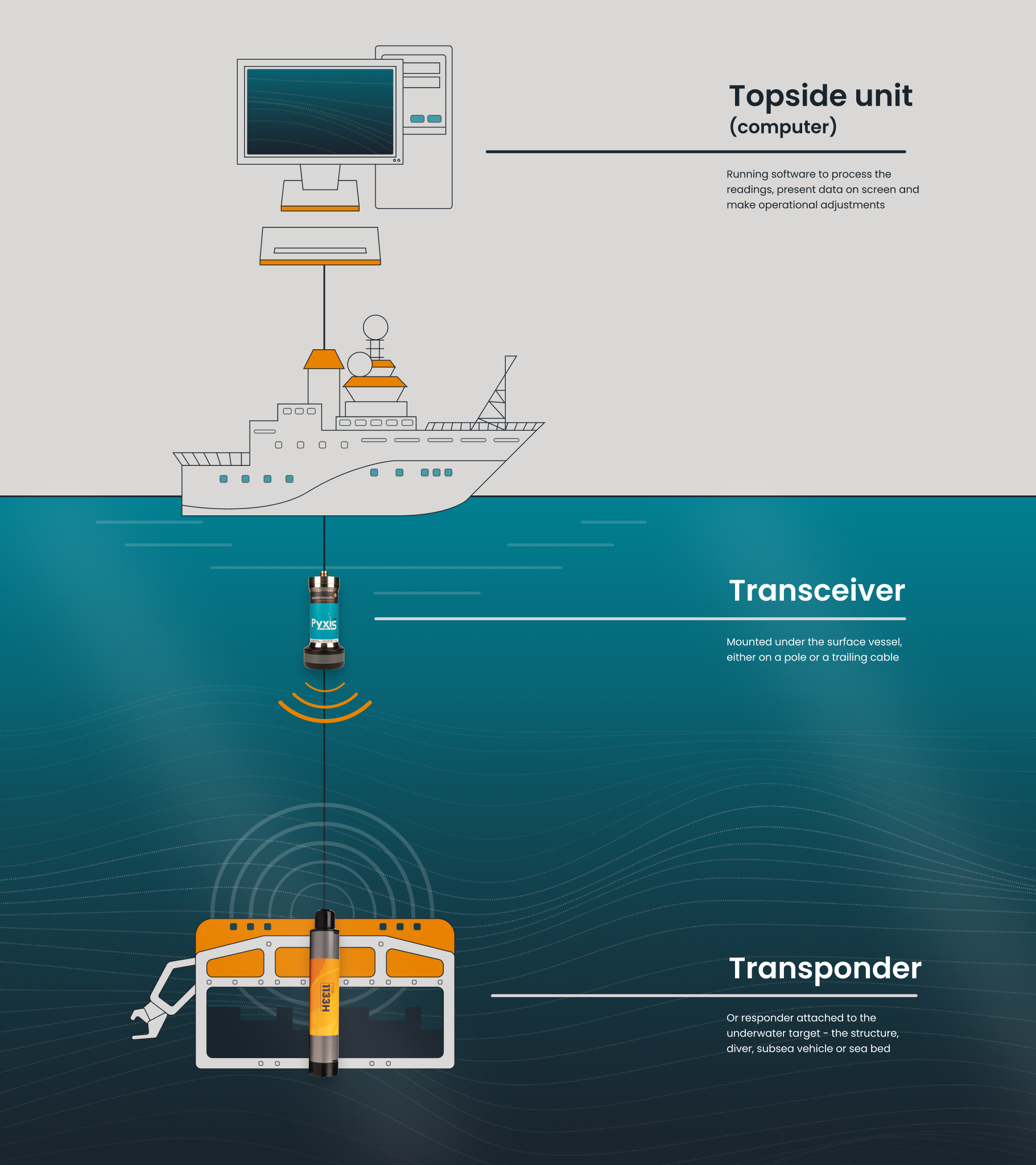
A USBL has three functional elements:
- A transponder or responder attached to the underwater target – the structure, diver, subsea vehicle or sea bed
- A transceiver mounted under the surface vessel – either on a pole or a trailing cable
- A topside unit (computer) running software to process the readings, present data on screen and make operational adjustments
The system works by the vessel’s transceiver emitting an acoustic signal, which is picked up by the transponder beacon on the target. The transponder then sends the signal back to the transceiver, and the direction of the return and the time taken for it to get back are used to determine the target’s location relative to the vessel.
Transponder beacons will vary in power, length of battery life and strength to withstand water pressure at particular depths. Smaller beacons are ideal for divers, small ROVs and short-range tracking, while their larger cousins are useful for extreme depths and longer deployment, often as reference markers.
Transceivers can vary in the size of their heads, or their array, with individual sensors separated by centimetres or by tens of centimetres. The wider the array, the more it will be able to detect the variances in the returning signal, therefore determining the bearing of the target. The simplest transceiver can track 4 targets at a time, with this rising to 10 or 16 targets for the more advanced units.
What can affect a reading from a USBL?
A USBL is, on a basic level, using sound travelling through water to determine the location of any given target. This means the actual speed of sound in water is the most important data point for all your readings – if you have an incorrect figure for how fast sound is moving through the water, then you will also have an incorrect reading for the target.
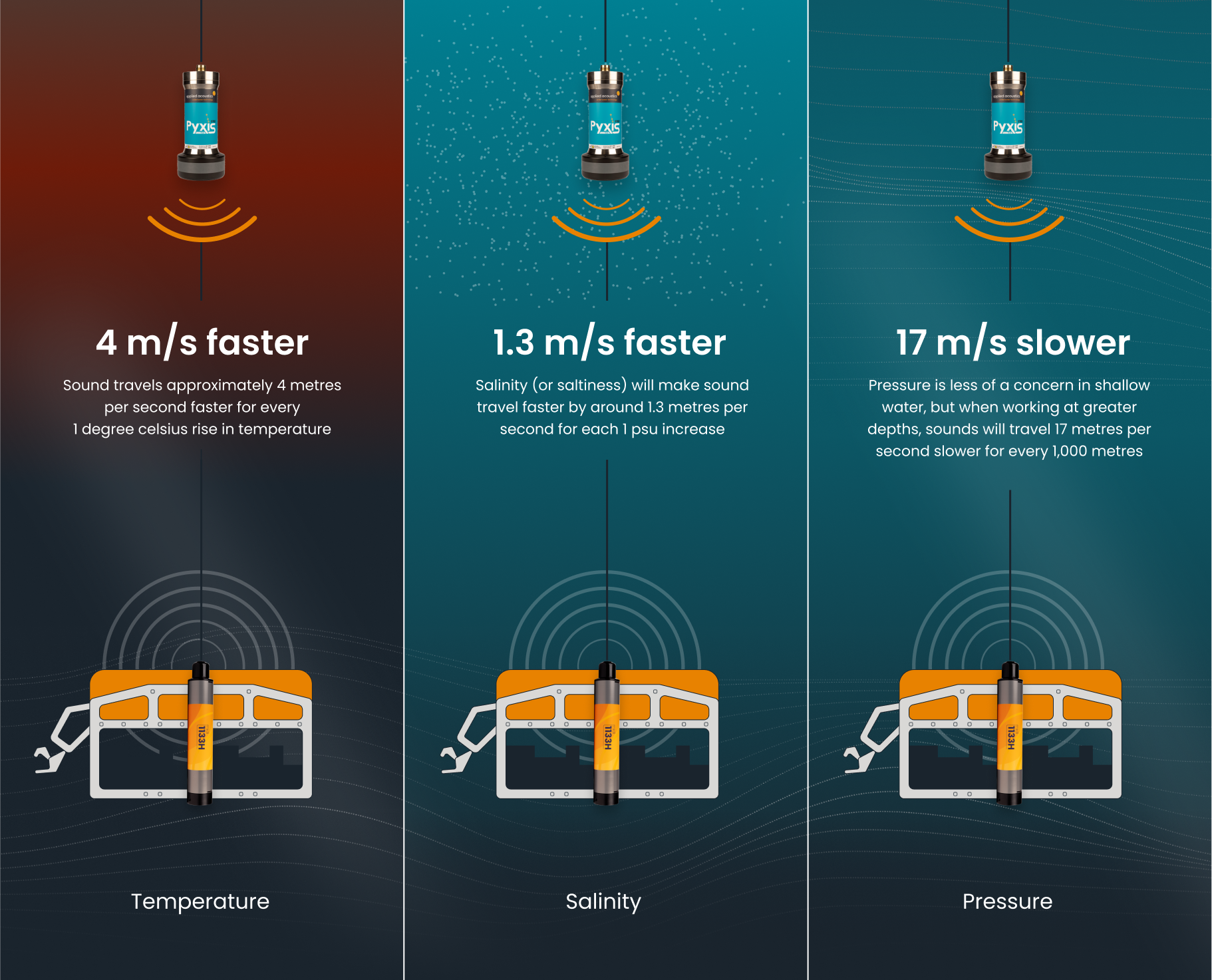
The problem is that the speed of sound through water is not constant. It will be affected by the water’s temperature, salinity and pressure – all of which must be determined and accounted for in the calculations. Water temperature will vary from the surface, where it will be typically warmer (especially if working in a hot part of the planet), to the sea bed, with the ultimate temperature dependent on depth. Interestingly, sound travels approximately 4 metres per second faster for every 1 degree celsius rise in temperature.
Salinity (or saltiness) will make sound travel faster by around 1.3 metres per second for each 1 psu increase, and can vary according to your proximity to the coast, where freshwater mixes with seawater. Pressure is less of a concern in shallow water, but when working at greater depths, sounds will travel 17 metres per second slower for every 1,000 metres.
With all this in mind, you should always take a reading with a dedicated sound velocity probe. This will account for all these factors to determine the speed of sound in the water you’re working in, and you can use the profile generated to calibrate your USBL system.
Also note that you should always position transceivers at least a metre below the lowest point of the vessel (but the deeper, the better). This is to avoid any excess vibrations on the installation from the vessel’s propeller or engine, and reduce signal reflections from the ship’s hull.
Finally, your USBL system should be integrated with both a gyrocompass and a geological survey package to compensate for the orientation of the vessel and provide a full picture of your data. Both of these are integrated as standard into aae products.
The purpose of Shallow Water USBLs
Mapping the seabed or tracking objects in shallow water (anything up to 300 metres or less) requires a different approach to deep sea projects, especially if you are working in a harbour or close to the coastline. A lot of the time, this system is used to map the seafloor and track the position of undersea structures – for example, when preparing the foundations or tether points for offshore wind turbines, or tracking divers inspecting underwater pipelines.
We cover Shallow Water USBLs in a dedicated article in this site, but perhaps the most important difference between USBLs for shallow and deep water is in the transceivers used. Shallow water means less distance for the sound pulses to travel through, so you can use an omni-directional transceiver, which will give accurate readings of up to 1,000 metres, with many able to track almost to the horizontal, making them perfect for shallow water.
The purpose of Deep Water USBLs
Deep Water USBLs are generally used during geological analysis, deep sea exploration and challenging environments. When working in deep water (anything from 300 to 5,000 metres or more), you will need to use a directional transceiver and a more powerful transponder beacon in order to obtain the most accurate readings.
Instead of transmitting a wide-angle signal, a directional transceiver focuses the acoustic pulse into a ‘cone’ of around 30 degrees. This really starts to become effective at depths upwards of 750 metres, as the further away you get from the target, the wider the area the sonic cone will cover. You will obviously need to keep targets within that cone of operation – which is fine if you are directly over your target, but can get more difficult if you are tilting your head to follow moving targets.
If working in deep water, we would recommend our MIPS 2785 and Pyxis 3780 systems – both of which can go up to 3,000 metres, and can carry directional heads.
Uses of a USBL
As mentioned, the USBL that’s best suited to your project will depend on your environment – the depth, the temperature and the salinity of the water. But it will also depend on the number of targets you need to track – the simplest USBL systems will track 4 targets simultaneously, while those with higher specifications are able to track 16 at the same time.
Typical uses for our USBLs are:
- Research vessels – particularly for survey and construction sectors, where you will need versatility for depth and temperatures.
- Position and track a remotely operated vehicle – so you know exactly where your ROV is during inspection and exploration activities.
- Tracking and communications – perfect for keeping your divers safe, especially considering how transponder beacons can stay active beyond their operational life to allow location in case of loss.
aae’s USBLs in the field
With over 700 systems currently in use across the globe, we’re grateful to have a growing number of satisfied clients who continue to take advantage of our range of USBLs’ capabilities.
Ocean Scan, based in Chile, specialises in identifying shipwrecks, pipelines, debris and underwater hazards. They integrated a Nexus 2 system and 1100 beacons with an upgraded GNSS system, basemap tools and CAD/GIS files to obtain vastly improved results in a greatly reduced time window.
“The USBL equipment allows for easy handling and a fast learning curve for its operation. Technical support has always been there when solving a problem. In general, our experience with aae has been very satisfying.”
GEOxyz provides comprehensive offshore geophysical, geotechnical, hydrographic and topographical surveys mainly to the oil, gas and renewable energy sectors. Again, their successful use of Nexus 2 and 1100 beacons has cut their survey times, improved accuracy and enabled them to deliver a better experience for their clients.
“You want your operations to be as inexpensive as possible, with as big a margin as possible and as little downtime as possible, and aae’s equipment delivers this.”
Looking to improve your survey time and accuracy?
If you’re involved with deep or shallow water operations requiring accurate positioning data for structures, vehicles or personnel, then you’ll understand the advantages of a high quality USBL system. If you have specific requirements for a particular project, our engineers will be happy to help.
In the meantime, with this knowledge of how USBLs work, take a fresh look at our Easytrak Alpha, Nexus and Pyxis USBL systems and see which might be the best for your needs.
Briggs Marine, a market leading provider of marine and environmental services, will provide their vessel, Solent Guardian, which will be mobilised with applied acoustics INS + USBL positioning system, Pyxis, at Ocean Business from 18th – 20th April 2023. aae technologies will be hosting demonstrations aboard the Solent Guardian for the duration of the event.
Briggs and aae will also be joined by Klein – A MIND Technology Business, who will host their official launch of the 4K-UHR side scan sonar at the Ocean Business event, and will also be providing demonstrations onboard the Solent Guardian. The Klein 4K-UHR is designed specifically to excel in Ultra-High-Resolution surveys with improved range performance and motion tolerance, produces MHz-type resolution without sacrificing range performance and offers High and Ultra-High Resolution simultaneous modes of operation with optimized range and resolution dependent configurations.
Together, the companies will collaborate to showcase the latest products and capabilities, bringing together industry experts, Project Managers and Technical Authorities all on the hunt for the products and innovations that are leading the way in the ocean technology sector.
aae technologies will be using the Solent Guardian to run demonstrations of its integrated INS + USBL positioning system, Pyxis. Building on decades of in-house experience in subsea acoustics, Pyxis takes the best of the company’s subsea acoustic tracking technology and combines it with a highly advanced MEMS-based inertial navigation system (INS) from SBG Systems. As a fully integrated, factory fitted package, Pyxis is a portable, calibration-free USBL system able to operate immediately from a vessel of opportunity or as a permanent installation, providing major advantages in accuracy and performance, as well as time and cost savings.
Briggs Marine’s five ‘Guardian’ class’ survey vessels are the ideal platforms for carrying out a wide range of nearshore and coastal survey activities. Coded to MCA Category 2 and capable of carrying up to 12 passengers, the vessels can be mobilised anywhere in the UK or further afield if necessary. Vessels are available for short or long term charter and are well proven for delivery of hydrographic, environmental, geophysical and oceanographic surveys.
Gavin Willoughby, Business Development Manager at aae technologies comments: “Ocean Business is an important show for us. It’s very hands-on and provides us with the opportunity to host dedicated vessel demonstrations in partnership with other world-class providers such as Klein and Briggs Marine. We’re looking forward to showing the capabilities of our products to new and existing clients once again.”
With omni-directional and directional transceiver options, the versatility of Pyxis makes it ideal for a wide variety of applications; from shallow water diver tracking to deeper water ROV/ AUV positioning, and towed sensor arrays such as side-scan sonars and magnetometers.
To read more about what you can expect to see at Ocean Business, check out our latest blog.
Underwater tracking in simplistic terms is often referred to as underwater GPS. But it’s not quite the same. Does GPS work underwater? In short, no. The Global Positioning System (GPS) or broader term Global Navigation Satellite System (GNSS) works brilliantly through the air to understand where targets are, and how they’re moving. However, the moment you go beneath the water’s surface, GNSS isn’t any good. Why?
Simply, the radio frequency on which GNSS relies (1.2Ghz to 1.6Ghz), can’t penetrate water, and actually reflects off the surface. In order to have reliable underwater tracking, acoustics is the most commonly used method. At applied acoustics, we specialise in Ultra Short Baseline (USBL) technology, and operate in the medium frequency band (MF), typically from 16Khz up to 32Khz. This is the most common way to infer positioning subsea – whether that’s equipment, people, or points of interest.
How USBL systems operate
A USBL system consists of:
- a topside console or hardware interface;
- a transceiver, mounted to a pole on a boat or other platform and extended down into the sea;
- a positioning beacon, located either on the seabed, ROV or towed array for positioning of targets such as underwater vehicles, towfish, structures and other applications.
How does a USBL system work?
An acoustic pulse is typically transmitted from the transceiver to the positioning beacon which then replies acoustically; the reply signal is received by the transceiver and displayed on the surface console or hardware interface.
The transceiver calculates the time between the first signal sent to the positioning beacon and its reply. The reply is received by multiple elements inside the transceiver head, which calculates the target’s range, bearing and depression angle using a least mean squares (LMS) algorithm, which is then passed to the surface console, and is displayed on the user interface. This allows the operator to locate where their targets are at a single glance.
The key advantage of a USBL over other types of subsea positioning (such as LBL arrays) is their convenience. They can be quickly deployed from the surface and there is no need for any additional equipment to be deployed subsea. The only exception is that each target must be fitted with a compatible acoustic positioning beacon.
To maximise positioning repeatability and accuracy, we always recommend the use of our proprietary Sigma digital protocols. The digital signal spread across the frequency band allows for a more robust signal reception and improved timing and range stability, increasing the repeatability of results.
Other external sensors can be interfaced into the navigation system such as an inertial measurement unit (IMU), a Gyro and target parameters, such as depth, or in the case of vehicle tracking, heading. This can often be sent up serially, over a network, or with the right hardware, acoustically and used by the USBL system to improve the position accuracy.
How can you interface GNSS to a USBL?
Standard practice is to input the ship’s GNSS into a USBL system, allowing the positioning data to be converted to absolute positions by the USBL system.
This process takes into account all the aforementioned sensors and data that can be interfaced to the system. However, setting up and calibrating these sensors and GNSS input takes time. Consequently, it’s important to perform a calibration to maximise accuracy.
Because of this complexity, a USBL system is best suited to long-term installations or longer-duration survey operations, such as DP reference positioning, diver support, ROV operations and towed surveys.
What’s the alternative?
A combined USBL and INS (inertial navigation system) system such as the Pyxis INS + USBL has closely coupled inertial sensors to the acoustics and GNSS antenna connected to the USBL system. This allows for precise and accurate alignment of the GNSS to the acoustics for real time corrections for the changing movement of the vessel.
Other than an alignment of the GNSS antenna to the transceiver, the system is calibration- free. This makes it ideal for quick mobilisation onboard vessels of opportunity, and for accurate and repeatable positioning on vessels that do not have the capability of high accuracy survey grade Gyros and IMUs.
This all-in-one package enables the operator to begin working immediately from any vessel, saving operational time and money.
Do divers have GNSS?
As anyone who’s gone diving with a mobile phone will know, the GNSS signal becomes very weak or disappears completely as water obstructs the radio waves. This means divers are unable to use standard GNSS devices to communicate underwater.
Positioning of divers is sometimes challenging, as divers typically operate in or around structures. In some applications, a GNSS can be deployed on a buoy above the diver and connected by a wire that enables the diver to navigate underwater, with the GNSS position being sent to an underwater monitor.
Our range of MiniPod submersible GNSS receivers can be used for this application. Combined with a small battery pack the diver’s position can be accurately sent to the diver and wirelessly sent back to the vessel/ dive team for monitoring.
Where this is not possible, such as commercial dive operations, diver positions can be generated by using a small acoustic positioning beacon attached to the diver and a USBL system. This allows the ship to keep track of the divers’ positions, improving subsea safety and allowing the dive operators to provide divers with instructions for subsea navigation.
Our range of underwater tracking equipment
Easytrak USBL Systems: are available in a range of specifications to suit the size, depth, range, and number of targets that need to be positioned. Their advantages include:
- Ability to track multiple targets at the same time
- Compatible with aae acoustic release and positioning beacons
- Ability to track shallow water targets as well as targets operating in deeper waters
Positioning Beacons: our positioning beacons can cover a wide range of applications, from short-range dives and towed arrays to vehicle tracking in deep water and challenging environments. Stable, with a rugged construction, they are compatible with the majority of industry-standard tracking systems.
Underwater tracking devices – case study
Learn how Ocean Scan utilised the aae Easytrak Nexus 2 USBL and Mini Beacons to accurately position their assets to identify shipwrecks, debris and other underwater hazards.
Very simply, an Ultra Short Base Line (USBL) system is a method of positioning subsea, whether its an ROV, towfish, diver, or the vessel itself. A USBL system consists of a transceiver which is mounted on a pole under the vessel, a beacon which is mounted on the item you are interested in tracking and a topside computer system which calculates the range and bearing measured by the transceiver.
applied acoustics have been manufacturing survey grade USBL systems since 2010. Our Easytrak USBL family comprises our entry-level Alpha system right up to our newest member, Pyxis. Nexus 2 and Pyxis systems are both survey-grade solutions for positioning and navigation subsea within vital marine sectors, such as: Oil and Gas, Renewables, Defence, Ocean Science, Aquaculture, Port and Harbour Surveys and UXO Surveys and Clearance.
Here’s what you can find in this guide:
- What is the Easytrak USBL line-up?
- What are the recent developments?
- What were the systems’ accuracy levels and what are they now?
- How does this benefit customers?
- How do I select suitable beacons for my application?
What is the Easytrak USBL line-up?
There are a number of different systems within the Easytrak USBL family, each of which have their place. First is our Easytrak Alpha system which suits shallow water surveys; this is followed by the Easytrak Nexus 2 Lite system, and then the very successful Nexus 2 itself. The line-up is completed by our newest and highest grade USBL + INS system, Pyxis.

What have been the recent developments?
Our engineering team have been working hard to improve the accuracy and performance of our entire Easytrak USBL product offering. A new transceiver has been designed for the Alpha system, the 904C, which has increased the accuracy from 3.5% to 3% of slant range. The previous Nexus Lite system has been replaced with the Nexus 2 Lite, utilising the 2686 transceiver (previously part of the Nexus 2 system), which has increased the accuracy from 1% to 0.45% of slant range. And finally, the Nexus 2 and Pyxis omni-directional transceivers have been redesigned and now include 7 internal elements instead of the previous 5, further improving accuracy and all-round performance.
What has changed?
As mentioned, all developments by our engineering team have made our entire family of USBL systems better performers in terms of the slant range system accuracy. Replacing the 903C, the new 904C is manufactured from marine grade stainless steel and has an improved acoustic slant range accuracy of 3%, while an upgraded compass fitted inside the 904C improves the repeatability of results.
The Nexus 2 Lite system has been completely upgraded from the previous Nexus Lite system, with a new user interface and added compatibility with our 2686 transceiver, giving a 0.45% slant range accuracy. The Nexus 2 Lite system now supports applied acoustics’ Sigma 2 protocols, proven to improve position stability and range repeatability. The Nexus 2 Lite also increases the number of trackable targets from 8 to 10. These changes have precipitated new software and an updated console for use with the reliable 2686 transceiver.
Previous Nexus 2 and Pyxis systems fitted with the 2686/3781 omni-directional transceivers had a slant range accuracy of 0.45%. The new 7-element 2782/ 3782 transceivers have further increased the slant range accuracy to 0.25%.
How do these changes benefit our customers?
The Alpha system now has an upgraded 904C transceiver, which is smaller than the 903C predecessor and features a rugged stainless housing. The compact form not only allows for less motion in free hanging applications, which can improve accuracy, but also allows deployment by a single person and easy, cost-effective transportation. This makes the 904C ideal for small ROV or diver tracking and instant mobilisation on smaller vessels of opportunity.
The 904C power supply and receivers have been redesigned to reduce noise and improve the target signal detection, which in turn improves the repeatability of position. A new, more accurate compass allows for motion compensation to improve accuracy when using the 904C standalone without external sensors.
Easytrak Nexus 2 Lite incorporates Sigma 2 Spread Spectrum technology to provide a secure acoustic link. The Sigma 2’s wide bandwidth transmissions reduce the system’s susceptibility to interference. This provides our customers with an accurate and stable positioning system that is easy and intuitive to operate. A geo-referenced graphical overlay can be offered as an optional extra, which is typically used when operating near shore or surrounding structures like wind farms.
The fact that the Nexus 2 Lite is a high performer at a low cost makes it a standout USBL system when it comes to a number of different applications, such as underwater survey and inspection, subsea construction sites, cable and pipeline route surveys, hydrographical and geotechnical surveys and nearshore construction and salvage operations.
How do I select suitable beacons for my application?
The best way to choose the most suitable beacon for your application is to check out the different beacon options on our website. All our Easytrak USBL systems are compatible with all of our different types of beacon.
If, for example, you wanted to track divers, you will know how deep and how far away from the vessel they could go, and therefore what range you’ll need the beacon to operate to. You will also know that as the beacon will be fitted onto a diver, you won’t want it to be heavy. It’s therefore safe to say the best beacon for diver tracking would be our Micro Beacon. But we have all kinds of beacons for all ranges and use cases.

With the increase in the amount of targets Nexus 2 Lite can now achieve, we are providing greater flexibility across the whole range. This means a customer will not necessarily need to go to a higher-rated or deeper system just so they can track their required number of targets.
Get the right system for your work
If you are in any doubt or would prefer to discuss your options with a member of the team, simply call or email our office. We will be more than happy to talk over what’s needed for your projects and help you find exactly the right system for your needs.
Mapping the seabed or tracking in shallow water requires a different approach to deep sea projects, especially if you are working in a harbour or close to the coastline. Our acoustic positioning product co-ordinator Ben Darling gives his tips for working with shallow water USBLs.
Firstly, what is classified as shallow water?
Usually it’s anywhere where the depth to the seabed is around 300 metres (around 1,000 feet) or less. This is typically close to the coastline, at a quayside or in a harbour structure.
A USBL is a method of locating objects subsea using acoustics, and a shallow water environment will mean using some different approaches from scanning in deeper water. A transponder beacon is attached to whatever you’re trying to track and the transceiver will be positioned on the vessel.
There are various types of transponder beacons for various applications – some go on divers or on ROVs, and some sit on a fixed frame on the seabed. Either way, you will be able to accurately position where the frame or beacon is. The data output can then feed into a ship’s DP system, which holds a constant position over a target, or it can be used to follow a moving target.
The position can also be interfaced into standard survey packages to give data from other equipment geographical representation.
Where is best to position the transceiver on a vessel?
Transceivers can be mounted over the side of the vessel on a pole mount, or through the vessel itself via a gate valve or a moon pool.
The most important thing to remember is that they must always be positioned at least a metre below the lowest point of the vessel, but the deeper the better, avoiding any excess vibration on the installation. This is to reduce any reflections that may hit the hull of the vessel and come back to the receiver head, and thus get counted as a reply. If this happens, you’ll generate invalid replies and compromise your survey.
So, keep the head away from the bottom of the vessel and any thrusters or direct propeller wash that could go over it and create false replies.

Does tilting your transceiver towards the target help scanning?
For shallow water work, definitely yes. Instead of the transceiver facing down into the ocean, you can tilt it at 30 degrees so that the optimal cone of operation is set up for shallow water work behind the vessel, especially when towing various bits of equipment, side scans, multi beams and other applications.
With a tilted head, you need to ensure you’ve set the settings correctly. But you really need to be careful of the resulting blind spot behind the way it is pointing (which will be towards the front of the vessel, if towing). So you won’t be able to see anything from that direction, because the transceiver doesn’t work on a negative depression angle.
Tilting the head does limit the versatility of the work you can do, but it depends on what the ship is doing. If the ship is always towing something behind it that it wants to track, then it won’t be an issue. And providing the head is deep enough in the water, you won’t have issues with propellor wash.

Assessing your shallow water environment – what to look out for
Speed of sound is the biggest thing to consider in shallow water. If your speed of sound isn’t correctly set, then the readings and results you get back will be inaccurate. It’s essential to have an accurate reading from precise sound velocity probes or another item of equipment.
The speed of sound – the time it takes for sound to travel through a medium – is actually what we are using in order to work out exactly where the target is by measuring the time for an acoustic signal to travel to the target and back.
In a USBL, the receive elements in the heads are very close together, if the speed of sound used is slightly wrong then so will the calculated position. The accuracy will get worse the further the range of the target. In the Nexus and Pyxis systems, we can mitigate this by inputting an accurate sound velocity profile.
When you’re in shallow water, you need to be wary of ‘multi-path’. This is where signals bounce off the seabed or sea surface to come back to the transceiver, but might also bounce off hard surfaces if you’re working in a harbour, or around large structures.
What can help with this?
You can eliminate this by turning down the transmit power or using a lower powered beacon, and also reducing your receiver sensitivity. These are all adjustable within the USBL software.
This means the signal from the direct path will be strong, but any readings from multi-path will be a lot weaker because the further it travels, the quieter it will be. And a less sensitive receiver will not pick them up, or will do so only faintly. So you get a better signal to noise ratio, which is better for tracking in shallow water. Allowing the transceiver to decipher the true reply to the multi-path replies.
Anything else to worry about in terms of the environment?
The only thing to be really concerned about is speed of sound through the water column, which is affected by pressure, salinity and temperature.
The temperature will obviously change from the top to the bottom – exactly how much will depend on how deep it is. If you’re working somewhere particularly hot, the sea will be fairly warm at the surface, but going deeper the temperature will decrease, level out and become more stable. Either way, you’ll need an accurate temperature measurement in order to build the profile in the system.
Salinity can vary according to how close to the coast you are working, especially if you are close to any areas where a freshwater river is feeding into the sea. If fresh water is affecting the salinity, then your speed of sound will also be affected.
Accurately measuring the speed of sound is best done with a dedicated sound velocity probe and you can then upload the profile to the USBL system. There are temperature sensors inside the USBL console, and you can work out the speed of sound using tables, but there’s nothing better than a dedicated reading on the day.
The only other thing to consider is noise from thrusters and wash from other vessels. Rough seas or rain do not really have any impact. But if the sea is very calm, you can get multi-path readings from a signal bouncing off the flat surface!
When is it best to use omni-directional or directional beacons?
Directional beacons are generally used for longer ranges or deeper water. They should really only be used when you’ve almost reached the limit of an omni-directional beacon.
An omni-directional beacon will give you accurate readings up to around 1,000 metres, depending on exactly which beacon it is, so it’s good for shallow water. A directional beacon really starts to become effective at upwards of 750 metres.
Because the cone of a directional beacon is ±30 degrees, it works perfectly well if it’s directly below the transceiver, but the further away you get, the wider the area it is covering. This will work fine at 500 metres, for example, but you will need to keep targets within that cone the further away you get. We have reached slant ranges of 3,000 metres for readings with a directional beacon with a tilted head turned behind.
Is any of aae’s equipment particularly suited to shallow water positioning?
All our omni-directional heads are good for shallow water. That would be the Alpha system, the Nexus 2 Lite, Nexus 2 and Pyxis systems – they all have omni-directional heads. This means they can track almost on the horizontal, making them perfect for shallow water targets.
They vary in the range they can go to – Alpha goes to 500 metres and Nexus 2 Lite to 995 metres. The Nexus 2 and Pyxis systems can go up to 3,000 metres, and can carry directional heads, so they are also more suitable for deeper water as well, or for long lay-back work with a tilted head.
Positioning systems with a range of up to 995 metres are not subject to export controls, all applied acoustic systems can be limited to remove export limitations to enable a more straightforward option for shallow water positioning.
How easy is it to alter the settings on a USBL?
All the controls on our USBLs are fairly intuitive. We do incorporate an auto-gain function, so the unit will adjust the gain based on the quality of the data received back from the beacon – kind of its own feedback loop.
All the other settings are simply operated by sliders on screen, as part of the software. You’ll also see a colour-coded histogram of results that will tell you the validity of the replies – green if it was good, red if not received and orange if received but not usable to compute a position. This might happen if your speed of sound is set wrong, or simply because your filters, power or gain is set too high or low.
So you really have to adjust them for each individual scenario, depending on what you’re doing and the environmental conditions at the time. But they are all very straightforward – it’s all controlled by software, so you don’t need to open up the unit at all.
Any good feedback from clients?
Two good case studies on our website show how Nexus 2 improved results for clients, and these were both in shallow water operations:
Ocean Scan specialises in identifying shipwrecks, pipelines, debris and underwater hazards. They integrated a Nexus 2 system and 1100 beacons with an upgraded GNSS system, basemap tools and CAD/GIS files to generate vastly improved results in a greatly reduced time window.
“The USBL equipment allows for easy handling and a fast learning curve for its operation. Technical support has always been there when solving a problem. In general, our experience with aae has been very satisfying.”
GEOxyz provides comprehensive offshore geophysical, geotechnical, hydrographic and topographical surveys mainly to the oil, gas and renewable energy sectors. Again, their successful use of Nexus 2 and 1100 beacons has cut their survey times, improved accuracy and enabled them to deliver a better experience for their clients.
“You want your operations to be as inexpensive as possible, with as high a margin as possible and as little downtime as possible, and aae’s equipment delivers this.”
Helping diver safety
Every diver these days has to wear a tracking system, or will want to use a navigational aid. Visibility can be very poor in some sea areas, perhaps just three feet or a metre in some cases, so cameras are not the most ideal way of seeing what’s happening. Using an acoustic positioning system improves divers’ safety because you know where they are, and if one is in trouble you can send an ROV or another diver to that exact position to get a visual and assess what’s wrong, if anything!
A tracking system gives the operators above complete visuals on where the divers are relative to other objects. In our system, you can overlay a CAD file. So if your divers are assessing an asset on the seafloor, you can actually see them working around it in real time. And if you see them (or any ROVs) drifting off in any direction, you can take actions to assist.
Our 1329 beacon is the most suitable for divers.
Are accuracy and survey time an issue for you?
Talk to us today about your operations and the kind of results you want to achieve for yourself and your clients. Our experienced engineers and sales team will know exactly how our equipment can improve your data.
applied acoustics, an aae technologies group company, has reached an agreement with global subsea equipment rental specialist Seatronics, an Acteon company, to strengthen their USBL capability through the addition of aae’s Pyxis INS + USBL system to the Seatronics inventory. Finalised during Oceanology International in London, the deal recognises Seatronics as the first rental outlet to offer the Pyxis INS + USBL and cements a long running collaboration between the two companies.
As its name suggests, Pyxis INS + USBL is a closely coupled and fully integrated positioning system, taking aae’s high end and globally proven USBL technology and combining it with an industry leading INS package to create a calibration free USBL system capable of generating exceptional subsea tracking data. Featuring common interrogate frequencies, MiQ data telemetry and 16 target tracking, the Pyxis system lends itself to many offshore applications, with UXO surveys perhaps being the most notable.
Speaking from the OI conference, Paul Griffiths, aae’s Business Development Manager for acoustic positioning systems commented “This is a very exciting time for us to be launching our new Pyxis USBL + INS system into the market. I am delighted that Seatronics have added our new system to their portfolio of equipment which will enable their customers to use our most accurate USBL system we have manufactured to date!”
As a calibration free system, Pyxis INS + USBL is highly portable and able to immediately operate from any vessel as soon as the work site has been reached. The MEMS based INS does not fall under ITAR regulations, and the range restricted option means the whole system can be shipped unhindered and without export control to almost anywhere in the world. A feature of the Pyxis system is the ability for the operator to deactivate the range restriction in the field under an export-controlled regime.
Derek Donaldson, Acteon – Electronics & Tooling, Segment Managing Director added, “We are a client led business and our increasingly diverse customer base firmly believe there is great potential for the Pyxis system across a number of market segments, I’m looking forward to adding this solution to our rental fleet and expanding the range of solutions we can offer our customers whilst enhancing the flexibility of service provided by Seatronics.”
Seatronics is an Acteon Group company. Acteon is a global marine technology specialist trusted to provide bespoke remote access, inspection and survey construction support to subsea assets. Acteon’s capabilities include custom sensor solutions; subsea electronics equipment rental; service repairs and calibration support; lightweight observation remotely operated vehicles (ROV); and ROV tooling, all built in partnership with key equipment manufacturers. Acteon’s rental fleet includes more than 6,000 assets in four dedicated bases around the world.
applied acoustic engineering is an independent designer and manufacturer of highly regarded subsea electronic-acoustic products, and a founding member of the aae technologies group of companies. Founded in 1989, the company has an established international client base covering many industry sectors, backed up by overseas offices and service centers and supported by a dedicated global distributor network.
For more information on the Pyxis INS + USBL system, click here.
Nexus 2 is the second release of our popular digital USBL system. Originally released in 2016, it enabled a higher level of accuracy and repeatability, incorporating our Sigma 2 spread spectrum channels which added additional functionality as well as a higher level of accuracy and repeatability.
Customers enjoy working with our Nexus 2 system for a variety of reasons, but primarily its ease of use and the results achieved when using the system.
Do you need to accurately position your ROV/AUV subsea?
How about your towed magnetometer for UXO surveys?
applied acoustics have been manufacturing survey-grade USBL systems since 2010 and the Nexus 2 system is a high-grade solution for positioning and navigation subsea. We’ve achieved great success within a number of key sectors, from Oil and Gas to Renewables, Defence, Ocean Science, Aquaculture, Port and Harbour Surveys, and UXO Surveys and Clearance.
Helping subsea service specialists deliver a better experience for their clients
Ocean Scan knew aae were experts in technology associated with underwater positioning systems in conjunction with ROV equipment and approached us for technological help. Positioning accuracy is essential for the company’s work in identifying shipwrecks, debris, pipelines and underwater hazards.
aae assisted with the successful integration of several USBL systems into Ocean Scan’s Falcon DR-1000 ROVs, which are now performing high-depth marine infrastructure inspection work for a range of industries. These USBL systems have significantly improved Ocean Scan’s subsea operations, making it possible for them to deliver a better experience for their clients and achieve a higher level of satisfaction with all their undersea inspection work.
The evolution of the Nexus 2 USBL
applied acoustics have been manufacturing USBL systems for over 25 years, starting with the original analogue Easytrak USBL system, and now using spread spectrum digital signal architecture for the last 11+ years.
The Nexus USBL system was released in 2010 to allow higher levels of accuracy, with Nexus 2 following six years later, taking advantage of further technical advances. Our Sigma 2 spread spectrum digital acoustics lifted Nexus 2 to survey-grade navigation and positioning.
Nexus 2 highlights
- An established, highly advanced USBL system, with over 150 Nexus systems sold worldwide to a variety of customers.
- Standard bi-directional Sigma 2 spread spectrum offering quality acoustics with added functionality, superb accuracy and repeatability in shallow or deep waters.
- Fast Acoustic Data Uplink- an 800bps (including forward error correction) protocol allowing quick, secure and reliable data transfer between subsea instruments and surface command.
- ‘Multi-Fire’ Common Interrogate Function; the capacity to interrogate multiple subsea transponders with a single ping, giving faster update rates than conventional sequential firing, utilising our proven and proprietary Sigma 2 acoustic protocols.
- EasyCal 2 embedded calibration software provided as standard, saving valuable set-up time, ensuring operations can begin quickly and efficiently.
- Windows based software for ease of use.
- Industry standard VRU, DGPS, Heading, Depth Input and DP Telegrams, providing our customers with confidence that Nexus 2 has everything you need.
- Transceiver options available, capable of tracking fast moving targets at long slant ranges. Reliable, repeatable and accurate results have been achieved with towed targets moving at 10 knots. Particularly effective for UXO surveys utilising several magnetometers or sidescan sonars, diving operations, and for use at offshore worksites where several vehicles may be in use concurrently. The long range capability and exceptional accuracy specifications make Nexus 2 particularly effective for long layback towed application.
Customer satisfaction
“The experience of working with aae has been very good. USBL equipment has a technological development that allows for easy handling and a fast-learning curve for its operation. Technical support has always been there when solving a problem. In general, our experience with aae has been very satisfying.”
Alex Lobos Astudillo, Head of Hydrography and Oceanography at Ocean Scan
Get the right USBL for your project
If you feel that the Nexus 2 system is maybe more than you need to achieve required results or you haven’t quite got the budget, just drop us a call or an email. We will be happy to talk through your specific requirements and suggest the right system from our USBL product family to suit your project down to the ground. Or the seafloor!
Do you need highly advanced positioning and tracking with all the bells and whistles that is quick and easy to deploy, straightforward to operate and works in any subsea industry sector? Don’t hesitate to contact us or browse the Nexus 2 specs here. A quick conversation with our sales team will confirm if the Nexus 2 is the right USBL for you.
Divers are used throughout different industries for a variety of tasks; from inspection, maintenance and repair of subsea structures in the offshore energy sector, research and environmental management, to military applications. Knowing the location of people in the water is critical to the safe operation of work being undertaken.
A USBL system designed for shallow-water tracking can accurately determine the position and depth of subsea divers in all environments for reliable and safe systems of work. A USBL system also allows for the marking of targets and waypoints to assist a diver’s navigation in poor visibility.
However, effective diver tracking relies on understanding the intricacies and key features of a USBL system, so you can put it to optimum use. With that in mind, here are some of our top tips.
1. Get your acoustic signal right
Receiving a good acoustic signal is the most important element to achieving a reliable position, and the setup of the vessel transducer is key to this.
The transducer of the USBL system should be at least one metre below the hull of the vessel that it is being installed on to obtain an unobstructed 360° view below the surface of the water. This reduces the impact of acoustic reflections, which can result in inaccuracies of position. Any installation should be as clear as possible from potential sources of acoustic noise such as thrusters and propeller wash.
The tracking transducer should be located as close as possible to the vessel’s centre of gravity, to minimise movement during operations. Vessel transducers can be pole mounted (recommended) or free hung if cabling is suitable.
2. Set your transducer depth
Once installed, the USBL system should have the transducer depth entered, if required, so that accurate Z position (depth of target) can be calculated. Some systems like the Nexus 2 have built-in depth sensors so this is all taken care of. If using a reference position from a GPS or CRP, for example, then the offsets to this point must also be correctly entered. Failure to do this will result in positional errors. However, it is important not to duplicate these offsets in other third-party software.
3. Set the speed of sound through the water (VOS)
A fundamental for all USBL subsea positioning systems is the speed of sound of the water. Depending on a number of variables such as salinity, depth and temperature, the velocity will vary from 1440 to 1520 metres per second. If a velocity profile or measurement is unavailable, applied acoustics systems have calculation tools available.
4. Prepare for shallow water
For the majority of dive operations the diver will be in shallow water, often around structures or sources of reflection. Turning the power down on the transmission and reducing the gain in the tracking system can often reduce the background noise and provide a more stable position, reducing multipath signals.
Some systems will have automatic gain controls and others will be manual. Make sure to consult the operation manual so you’re familiar with these.
5. Select the right beacon and channel
Choosing the correct beacon and channel for operation will allow the operator to track the diver effectively while minimising carry weight for the diver and removing excess noise that can saturate the receivers in the tracking head and cause errors.
For diver tracking, a compact omnidirectional beacon complete with depth sensor is recommended to ensure beam pattern alignment between the beacon and tracking transducer, as well as an accurate depth (Z) measurement. This aids the positional calculation performed by the USBL system. applied acoustics now offers the 1329D with a built-in depth sensor as standard, which improves the accuracy of position and reliability of results.
Each beacon is set to a unique channel to prevent crosstalk and interference with any nearby operations. It is recommended to use a digital encoded channel scheme, for example, applied acoustics Sigma 2, which provides stable positioning and noise immunity. If using legacy CW tone channels, ensure channel separation greater than 500Hz in the uplink and downlink frequency.
6. Beacon location
Remember the acoustic path between the beacon and the tracking transducer is line of sight. Therefore the mounting position on the diver or subsea system has a significant role in system performance.
Our USBL systems at a glance
The Alpha USBL system is designed for quick setup and versatile shallow water use, so is ideal for tracking divers who generally operate within 500m of the vessel. It is a mobile unit designed for quick deployment on small vessels and provides basic tracking and positioning, making it ideal for most small surveying and inspection jobs. It can track up to four targets and doesn’t need a fixed mounting due to internal AHRS sensors.
Our Nexus systems provide a suite of tools for more accurate positioning and surveys. They allow for sigma spread spectrum technology, which offers a secure acoustic link to reduce the system’s susceptibility to interference. This is important when tracking in shallow-water environments where divers are typically utilised.
For optimum shallow water diver tracking, our INS + USBL system Pyxis is the most accurate in the Easytrak USBL range. Combining our bi-directional Sigma 2 spread spectrum acoustic protocol with a factory-fitted inertial navigation system (INS), the system is highly accurate, stable and calibration free, enabling rapid deployment and tracking.
For more information on any of our systems, acoustic beacons or to discuss your application, please feel free to contact the team.